# 4.2 Улучшенные возможности распознавания и анализ технологии микродоплеровского радара
В системах борьбы с беспилотными летательными аппаратами (C-UAS) способность распознавать цели всегда была одним из ключевых технических узких мест. Хотя теоретически системы должны уметь различать разные типы целей, на практике производительность распознавания часто ограничена условиями стабильного слежения. В настоящее время большинство систем могут достичь только распознавания уровня "Tier-2 Classification" для целей, таких как птицы и дроны. Чтобы преодолеть это ограничение, технология микродоплеровского радара стала ключевой точкой внимания в современных исследованиях противодронных радаров.
## Принцип работы и преимущества микродоплеровского радара
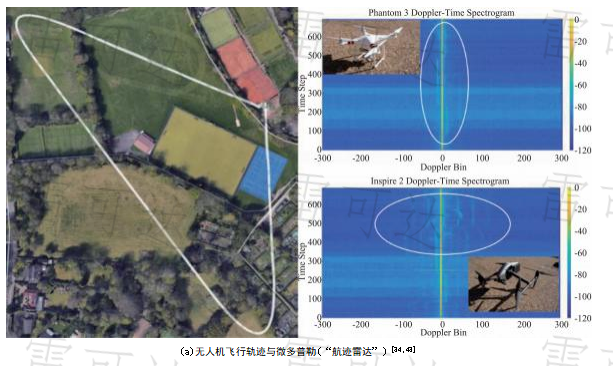
Микродоплеровские сигнатуры не только отражают состояние движения цели, но и содержат информацию о ее конструктивных деталях. Что касается выбора радиолокационного диапазона, то оптический диапазон обычно превосходит резонансный, так как в резонансном диапазоне могут усилиться рассеяния от основного тела из-за резонансных эффектов, тем самым подавляя микродоплеровские сигналы. Короткие длины волн способствуют образованию более выраженных доплеровских сдвигов, а более высокое доплеровское разрешение помогает усилить микродоплеровские сигнатуры, что позволяет более точно различать основную структуру и компоненты микродвижения.
На практике микродоплеровские радары часто используют X-диапазон и технологию частотно-непрерывной волновой модуляции (FCWM), обладая низкой пиковой мощностью (до 1 Вт) и высоким частотным разрешением, а также являясь экономически эффективными. В сочетании с алгоритмами, такими как преобразование Фурье короткого времени (STFT) для создания временно-частотных или цепстральных диаграмм, и применением классификаторов глубокого обучения, таких как сверточные нейронные сети (CNN) или сети долгой краткосрочной памяти (LSTM), система может не только различать птиц и дронов, но и дополнительно идентифицировать конкретные типы дронов, такие как геликоптерные, планерные и многоракетные дроны.
Кроме того, подход на основе микродоплеровских сигнатур имеет потенциал для адаптации и обновления системы. Однако технология все еще сталкивается с некоторыми проблемами: Во - первых, для получения высококачественных микродоплеровских изображений обнаружение обычно должно выполняться на относительно близких расстояниях (как правило, в пределах нескольких километров) и требует высокого соотношения сигнал - шум (SNR). Это означает, что радар должен находиться в состоянии слежения с достаточно длительным временем пребывания и количеством некогерентной интеграции; в противном случае качество изображения и производительность распознавания значительно ухудшатся. Во - вторых, хотя классификаторы на основе глубокого обучения очень эффективны, их процесс извлечения признаков не имеет интерпретируемости, и их производительность сильно зависит от качества обучающих выборок, что представляет определенные системные риски.


---
# 4.3 Ситуационное осознание и оптимизация производительности системы
В C-UAS способность радарного оборудования к ситуационному осознанию является ключом к определению его практической полезности. Из - за ограничений бюджета большинство противодронных радаров используют одинарную планарную антенную решетку, которая обычно может контролировать только определенную область. Достижение 360 - градусного полного покрытия представляет собой проблему в балансировке ресурсов между обнаружением, слежением и распознаванием.
## Ключевые противоречия и системные узкие места
Для повышения вероятности обнаружения системе требуются более длительные времена пребывания радара; для эффективного слежения нужна более высокая частота повторного обращения. Эти два требования взаимно ограничивают друг друга: быстрый сканирование сокращает время пребывания, снижая вероятность обнаружения, и наоборот. Кроме того, производительность распознавания также страдает - если различиение целей основано на признаках, таких как микродоплер, более короткие времена пребывания ослабляют частотное разрешение, тем самым влияя на точность распознавания. Таким образом, традиционные "сопровождающие радары" и "микродоплеровские радары" с трудом достигают оптимального баланса на практике.
## Решения: параллельная обработка и многомерное восприятие
Для решения вышеуказанных противоречий ключом является улучшение процесса обработки радиолокационных сигналов, переход от традиционного последовательного, однонаправленного процесса к параллельной, двунаправленной архитектуре. Конкретные меры включают:
1. **Разделение блоков слежения и распознавания**: Блок распознавания может независимо обрабатывать эхо в рамках текущего луча без зависимости от информации о слежении;
2. **Интегрированное обнаружение и распознавание (IDR) и слежение после распознавания (TAR)**: Результаты распознавания могут передаваться обратно в блоки обнаружения или слежения, повышая вероятность обнаружения и эффективность слежения;
3. **Одновременное сканирование, распознавание и слежение**: Достижение реального - времени панорамного мониторинга и динамического отображения нескольких целей.
Эта новая архитектура преобразует традиционные трехмерные радарные системы (дистанция, скорость, положение) в четырехмерные системы (добавление распознавания атрибутов), значительно повышая ситуационное осознание и действительно реализуя эффект мониторинга "что видим, то и получаем".
## Практические применения и валидация производительности
Изначально противодронные радары больше ориентировались на избегание пропусков обнаружения, но путем понижения порога обнаружения и сочетания с технологией автоматического распознавания целей (ATR) можно значительно увеличить дальность обнаружения при одновременном контроле ложных тревог. Эксперименты показывают, что радары, интегрированные с ATR, могут эффективно обнаруживать небольшие дроны с РПЭ 0,01 - 0,1 м², увеличивая дальность обнаружения до 12 километров и даже дальше, и точно идентифицировать суда, различные виды птиц и типы дронов.
Сочетание технологии ATR с информацией о слежении значительно повышает общий уровень ситуационного осознания системы. Например, в сценариях морского мониторинга система может четко различать суда и морских птиц, охотящихся на рыбу, обновляя траектории и атрибуты целей в реальном времени с задержкой отклика всего в несколько миллисекунд (около 10 мс), демонстрируя отличную реальную - времени производительность.

---
# 5. Заключение
По сравнению с традиционными противовоздушными радарными станциями противодронные радары больше зависят от технологии автоматического распознавания целей (ATR). Традиционные операторы могут идентифицировать крупные, быстромoving цели на основе информации о траектории и РПЭ, но низко - летающие, медленные и небольшие (LSS) дроновые цели трудно обнаружить и классифицировать среди помехи, что требует использования передовых методов ATR.
Будущие исследования должны сосредоточиться на многомодальном слиянии признаков, диверсифицированном размещении радиолокационных станций и интеграции нескольких сенсоров для создания более комплексных решений C-UAS. Основные выводы данной статьи следующие:
1. Технология ATR является важной для противодронных радаров, особенно для дронов категорий 1 и 2;
2. Текущая основная направленность дизайна (например, методы различия по траектории и микродоплеровские решения) требует, чтобы радар находился в состоянии слежения, что может вызвать задержку в реакции системы и ограничить улучшение общей производительности;
3. Интеграция функционала ATR может значительно увеличить дальность обнаружения, повысить способности распознавания и ситуационного осознания, осуществить скачок от трехмерного до четырехмерного восприятия и продвинуть противодронную технологию в военной, гражданской и коммерческой сферах.
---
*Отказ от ответственности: авторство данной статьи принадлежит оригинальному автору. Статья предназначена только для академического обмена и не представляет позицию какого - либо учреждения. В случае возражений или нарушения авторских прав обратитесь к редактору для удаления материала.*
### Рекомендуемая литература
**Рекомендуемая литература**:
- [Документ стратегии Министерства обороны США по борьбе с малогабаритными беспилотными летательными аппаратами](https://www.defense.gov/News/Releases/Release/Article/3573897/dod-announces-counter-small-unmanned-aircraft-systems-research-development-test/) - Официально опубликованный документ о политике в области исследования, разработки и тестирования C - sUAS Министерством обороны США
- [Технический комитет по радиолокационным системам IEEE](https://ieee-aess.org/radar-systems) - Авторитетные технические ресурсы и стандартные документы в рамках IEEE
- [Отчет по исследованиям системы борьбы с беспилотными летательными аппаратами НАТО (2023)](https://www.nato.int/cps/en/natohq/topics_177137.htm) - Официальный анализ НАТО технологии борьбы с дронами и совместной оборонной инфраструктуры
- [Google Scholar - Академические исследования по борьбе с беспилотными летательными аппаратами](https://scholar.google.com/citations?view_op=top_venues&hl=en) - Собирает высоко - цитируемые академические статьи и результаты исследований авторитетных учреждений