近年来,随着“低慢小”(Low Slow Small,LSS)无人机威胁日益加剧,反无人机雷达的需求愈发迫切[1-3]。然而,无论是在学术研究还是实际应用中,针对该雷达系统的技术探讨仍面临诸多未解难题。市场上已涌现出多种反无人机雷达系统,大多宣称在无人机回波探测方面表现卓越,部分系统已被采购并部署于关键场所。尽管如此,多个政府机构对其实际效能仍持审慎态度,并已启动多项验证项目以评估其可靠性。
在此背景下,本文聚焦雷达自动目标识别(Automatic Target Recognition,ATR)技术在反无人机雷达中的应用。通过系统梳理现有反无人机探测技术,并结合ATR视角深入剖析,本文进一步探讨了其核心挑战与优化路径,主要从目标特性与探测技术两个维度展开:
- 明确雷达探测涵盖“信号检测”与“目标识别”两个独立环节,强调目标识别应突破传统基于跟踪的方法;
- 指出反无人机雷达主要针对LSS无人机目标,通常指雷达散射截面积(RCS)低于2m²、飞行速度低于200 km/h、操作高度在1000米以下的小型航空器。按现行分类标准,主要覆盖Group 1和Group 2类别无人机;
- 将ATR性能划分为“探测(Detection)”“分类(Classification)”“识别(Identification)”及“描述(Description)”四个等级,并从ATR技术角度辨析“航迹判别”与“微多普勒识别”两种方法的差异;
- 通过实际案例说明,集成ATR技术可显著提升系统性能——不仅增强无人机探测距离与识别精度,还大幅改善整体态势感知能力。ATR技术有望推动传统3D反无人机雷达向4D系统演进(提供三维位置与一维属性信息),全面提升探测效能。这一进展预示反无人机雷达将在军事、民用与商业领域实现更广泛且可靠的应用。
1 无人机威胁概述
无人机威胁通常可分为针对民用设施与军事目标两类。民用场景侧重管控,军事应用更强调打击,但两者均依赖高效、准确且实时的无人机探测技术。
1.1 民用领域威胁
在民用领域中,“黑飞”无人机对民航机场的干扰已成为典型威胁,相关事件频发。例如,2018年12月19日,英国伦敦盖特威克机场因附近出现无人机而全面停航,导致超过14万名旅客受影响,千余架航班取消,机场运营中断长达36小时[4]。该事件凸显全球机场亟需强化安防策略以应对无人机风险。
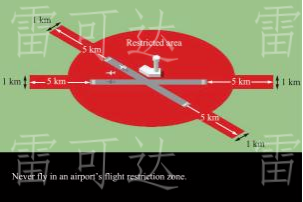
作为应对,英国政府实施了多项措施,包括设立机场周边5公里禁飞区(图1),并引进如以色列“无人机穹顶”(Drone-Dome)在内的反无人机系统(C-UAS)。然而,2019年该机场再次发生无人机干扰事件,表明现有系统仍非完全可靠。其原因可能包括操作者规避检测、多操作者协同干扰等复杂情况。

图1 英国机场周边无人机禁飞区示意(图片来源:CAADroneCode)
声明:本文版权归作者所有,仅供学术交流使用,不代表任何机构立场。如有内容问题或版权争议,请联系我们处理。
🔍 关键词:
反无人机雷达、ATR技术、低慢小无人机、雷达目标识别、无人机探测、4D雷达、C-UAS系统
相关阅读
以下是与本文主题相关的权威资源推荐,供进一步阅读和参考:
Drone Defense Hub — 提供全球反无人机系统(C-UAS)技术动态、政策分析与案例研究,涵盖民用与军事应用场景。
https://www.dronedefensehub.comRadar Systems Laboratory, University of Michigan — 专注于雷达目标识别(ATR)与信号处理技术研究,发布多篇低慢小目标探测相关学术论文与技术报告。
https://radar.engin.umich.eduThe Official Journal of the IEEE Aerospace and Electronic Systems Society — 刊登包括4D雷达、无人机探测与分类等前沿研究,强调理论创新与实际系统集成。
https://ieeexplore.ieee.org/xpl/RecentIssue.jsp?punumber=7